د پیډیټرین کشف سیسټم توضیحات او عملیات
منځپانګې
د موټر جوړونکي د سړک د ټولو کاروونکو خوندیتوب ته وده ورکولو لپاره د نه ستړي کیدونکي کار کوي او د زیان خطر کموي. یو له میتودونو څخه دا دی چې د پیاده لارو سره د ټکرونو مخنیوی وشي. لاندې د پیاده پیژندنې سیسټمونو ب areې شتون لري ، دوی څنګه تنظیم شوي او کار کوي ، او د ورته حلونو کارولو ګټې او زیانونه.
د پیډیټرن موندلو سیسټم څه شی دی؟
د پیډیسټرین کشف سیسټم د سړک کارونکو سره د ټکرونو پایلو مخنیوي یا کمولو لپاره ډیزاین شوی. دا فعالیت د دې توان نلري چې د پیښو شمیره 0 reduce ته راټیټ کړي ، مګر د دې کارول په حادثاتو کې د مرګ ژوبلې سلنه 20 reduces کموي ، او د 30٪ لخوا د جدي زیان احتمال هم کموي.
اصلي ستونزه د منطقي پلي کولو پیچلتیا کې ده. د برنامو او تخنیکي لارو کارولو سره ستونزه شتون نلري د پیاده تلو کشف کول. ستونزې په حرکت کې د حرکت او انساني چلند د سمت وړاندوینې مرحلې کې رامینځته کیږي کله چې د ژوند خوندي کولو خبره کیږي.
د سیسټم هدف او دندې
د سیسټم اصلي هدف د موټر چلونکي مخه کول دي چې د پیاده چلونکي سره ټکر وکړي. د ازموینې پایلې ښودلې چې حل د 35 کلومیتره ساعت په سرعت کې ښه کار کوي او تر 100٪ ټکرونه له مینځه وړي. کله چې موټر ګړندی روان وي ، سیسټم نشي کولی توکي په سمه توګه وپیژني او په وخت سره عکس العمل وښیې ، نو د بشپړ خوندیتوب تضمین ندي. د سیسټم اصلي دندې:
- د پیاده تلو کشف کول؛
- د خطرناک حالت تحلیل او د تصادم احتمال ارزونه of
- غږ د موټر چلوونکي ته د ګواښ په اړه خبرداری ورکوي؛
- د حرکت سرعت یا بدلون د اتوماتیک بدلون کمول؛
- د موټر بشپړ درول
سیسټم له کومو عناصرو څخه جوړ دی؟
سیسټم د ځانګړي سافټویر او هارډویر سره د وسایطو تجهیز کولو سره پرمخ وړل کیدی شي. پدې کې شامل دي:
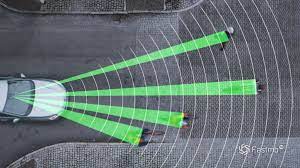
- د مخامخ کیمره او رادارونه - د وسایطو مخې ته سړک سکین کړئ او تر 40 متره لرې پورې توکي وپیژنئ.
- د کنټرول واحد یو بریښنایی وسیله ده چې د پیدایش کشف کولو وسیلو څخه معلومات ترلاسه کوي. واحد د سیستم تنظیم او کنټرول لپاره ډیزاین شوی ، او همدارنګه د تصادم ګواښ په صورت کې ډرایور ته خبر ورکوي
- سافټویر - د پیرودونکو او نورو شیانو پیژندلو لارو چارو مسولیت لري ، د پیشنهاد کولو درستتیا او د وضعیت تحلیل ، په بیړنیو حالتونو کې پریکړې کول.
د عصري سیسټمونو تخنیکي پلي کول دا امکان لري چې د سړک وضعیت تحلیل کړي ، د خنډونو شتون ، او د خوندي تګ راتګ محاسبه کړي.
منطق او کاري اصول
د پیاده لار موندنې سیسټم ساحه د 40 مترو په درشل کې سکین کوي. که اعتراض د کیمرې لخوا کشف شي او دا د رادار لخوا تایید شوی ، نو بیا دا تعقیب ته دوام ورکوي او د حرکت وړاندوینه کوي. کله چې وضعیت نازک کچې ته رسي ، نو ډرایور د اوریدو وړ خبرتیا ترلاسه کوي. د عکس العمل نشتون د اتوماتيک بریکینګ ، د ټریژري بدلون یا د موټرو درولو لامل کیږي. یو له اصولو څخه د پیرودونکو پیژندلو لپاره کارول کیږي:
- بشپړ یا جزوی کشف؛
- له ډیټابیس څخه نمونې لټول؛
- د ډیری کیمرې پایلې کارول.
د لوی تاثیر لپاره ، ډیری اختیارونه یوځای شوي ، کوم چې په کار کې د غلطیو او غلطیو کمولو تضمین کوي.
د مختلف تولید کونکو څخه د سیسټمونو ترمینځ نوم او توپیر
په پیل کې ، وولو د پیاده تګ راتګ خوندیتوب په اړه فکر کاوه ، او بیا ورته سیسټمونه په TRW او سبارو کې څرګند شول.
- د وولو د پیډیټریټین کشف سیسټم (PDS) - د ساحې لوستلو لپاره د یوې کیمرې کارول.
- د TRW - کیمره او رادار لخوا پرمختللي پیډیسټرین کشف سیسټم (APDS).
- د سبارو د سترګو لید - دوه لارې کیمرې او د سړک کاروونکو کشف کولو لپاره هیڅ رادار ندی.
د تخنیکي پلي کونې په پام کې نیولو پرته ، ټول سیسټمونه ورته عملیاتي اصول او یو هدف لري.
ګټې او زیانونه
تخنیکي حل د موټر سفر ډیر آرام او خوندي کوي. د پیاده لار موندنې سیسټم اصلي ګټې:
- د پیښو شمیر کمول؛
- تر km 100 کیلومتره في ساعت پورې سرعت د 35٪ تصادماتو مخنیوی؛
- په پیښو کې د خطرناک ټپونو او مړینې کچې کمول؛
- د ترافیک خوندیتوب زیاتوالی.
د نیمګړتیاو په مینځ کې ، دا د پام وړ ارزښت لري:
- د سیستم محدود انتخاب؛
- په لوړه سرعت کې د کار کولو مشکل
- لوړه بيه.
د ټیکنالوژۍ پرمختګ سره ، دا ستونزې به له مینځه ویسي.
د ځان د موټر چلولو موټرو او سړک ساتنې لپاره تولید کونکي موټر به د لږو پیښو لامل شي. امید دی چې د اعتراض پیژندلو کیفیت ، د ګواښ وړاندوینې او د تصادم مخنیوی به په راتلونکي کې وده وکړي. دا به حتی په لوړ سرعت کې د حادثاتو مخه ونیسي.
